PROJECT 01
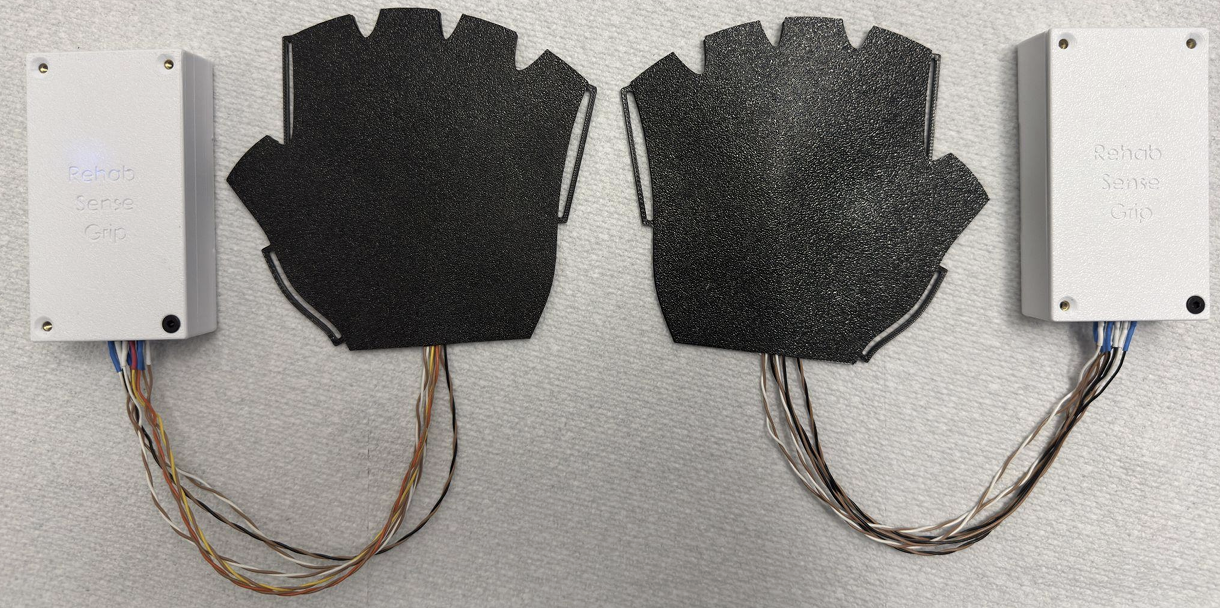
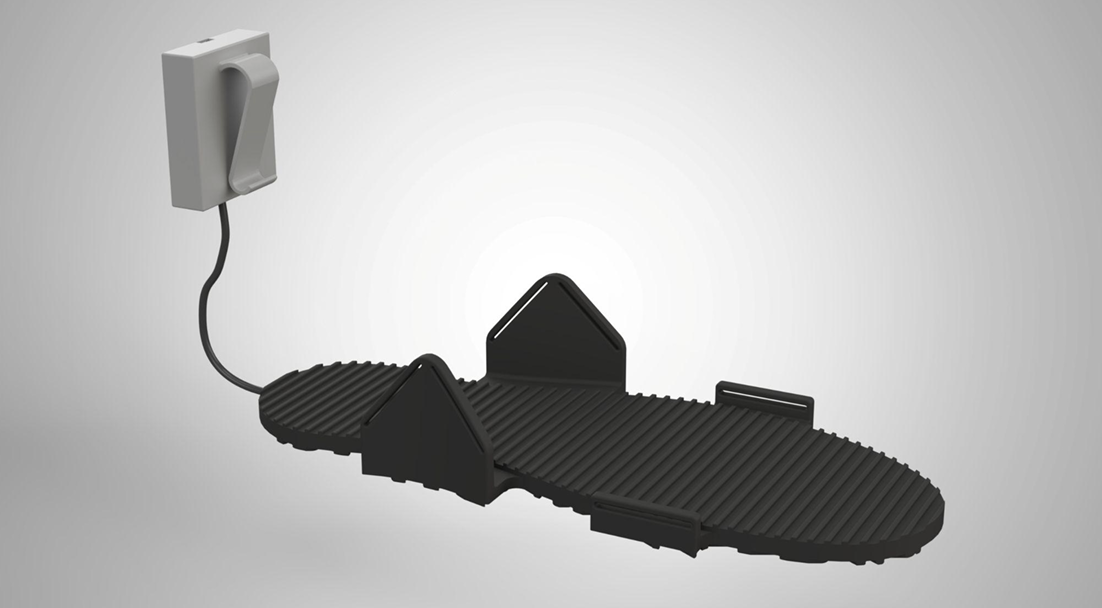
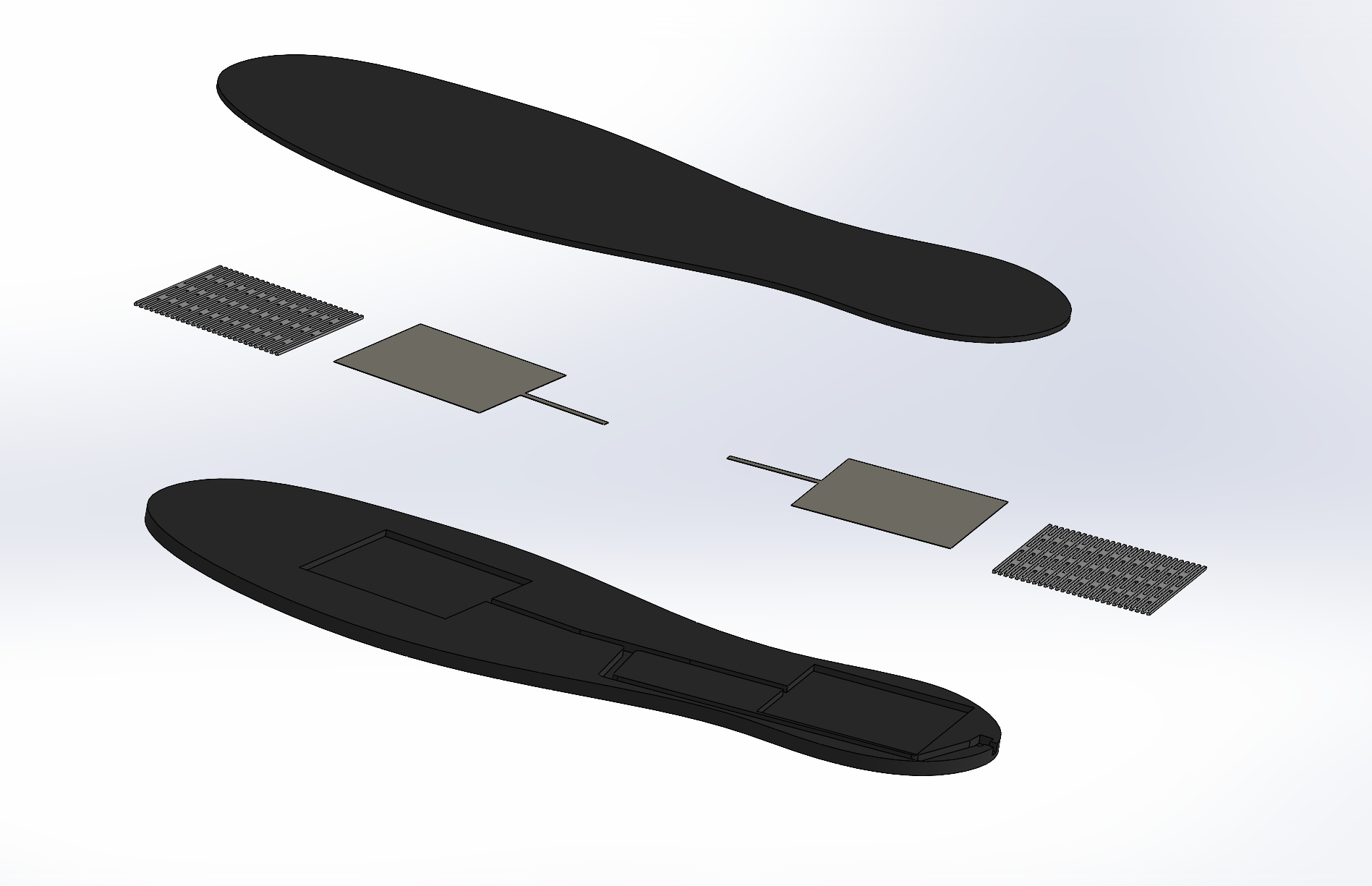
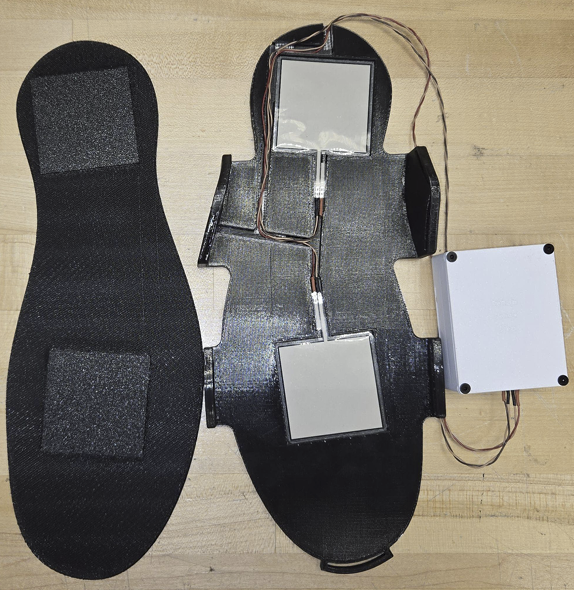
Wearable Rehabilitation Shoe Sole & Glove Device
Barrow Neurological Institute & Dignity Health Care — ASU Capstone
SolidWorksFusion 360FSR SensorsOp-Amp CircuitsESP32Wi-Fi3D PrintingV&V Protocols
- Led new product development of a dual wearable system (glove + outsole) with 7 pressure sensors from concept to working hardware, existing tools only measured total force, so designed per-point mapping from scratch.
- Designed and fabricated TPU housings, ABS enclosures, and custom 2 mm sensor “islands” in SolidWorks, handled CAD, 3D printing, and hands-on assembly end-to-end.
- Soldered and integrated the full electronics stack: ESP32-S3, MCP6002/6004 op-amps, DRV2605 haptic drivers, hit 45 FPS with sub-100 ms latency, solving the Bluetooth lag problem.
- Developed and executed V&V protocols including sensor calibration (<5% error), 10+ hour battery life, 3,000+ cycle durability
- Built a real-time color-coded pressure feedback interface with data export; therapists validated clinical suitability.


PROJECT 02
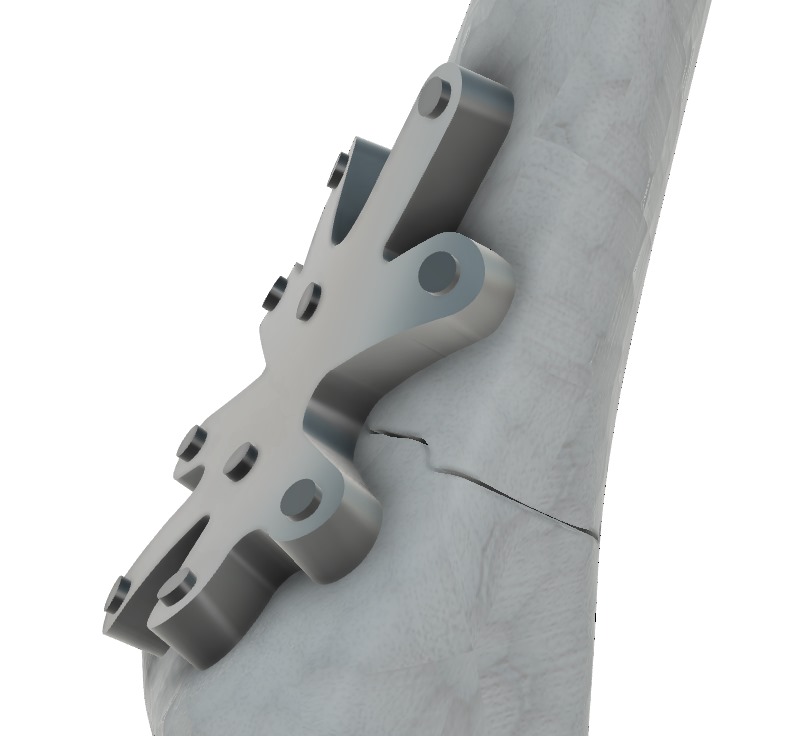
Biomechanical Analysis of Additively Manufactured Implant
Radial Head Transverse Fracture (Wrist) — Medical Device Project
DMLS 3D PrintingANSYS FEASolidWorksFatigue AnalysisTi-6Al-4VDesign Controls
- Developed a patient-specific radial head implant using DMLS additive manufacturing and comprehensive FEA analysis for transverse fracture fixation.
- Achieved a 34% reduction in stress shielding over standard implants through topology-optimized lattice structures.
- Conducted stress analysis, fatigue life estimation under physiological cyclic loading, and structural integrity evaluation.
- Documented verification methods aligned with regulated medical device design controls.




PROJECT 03
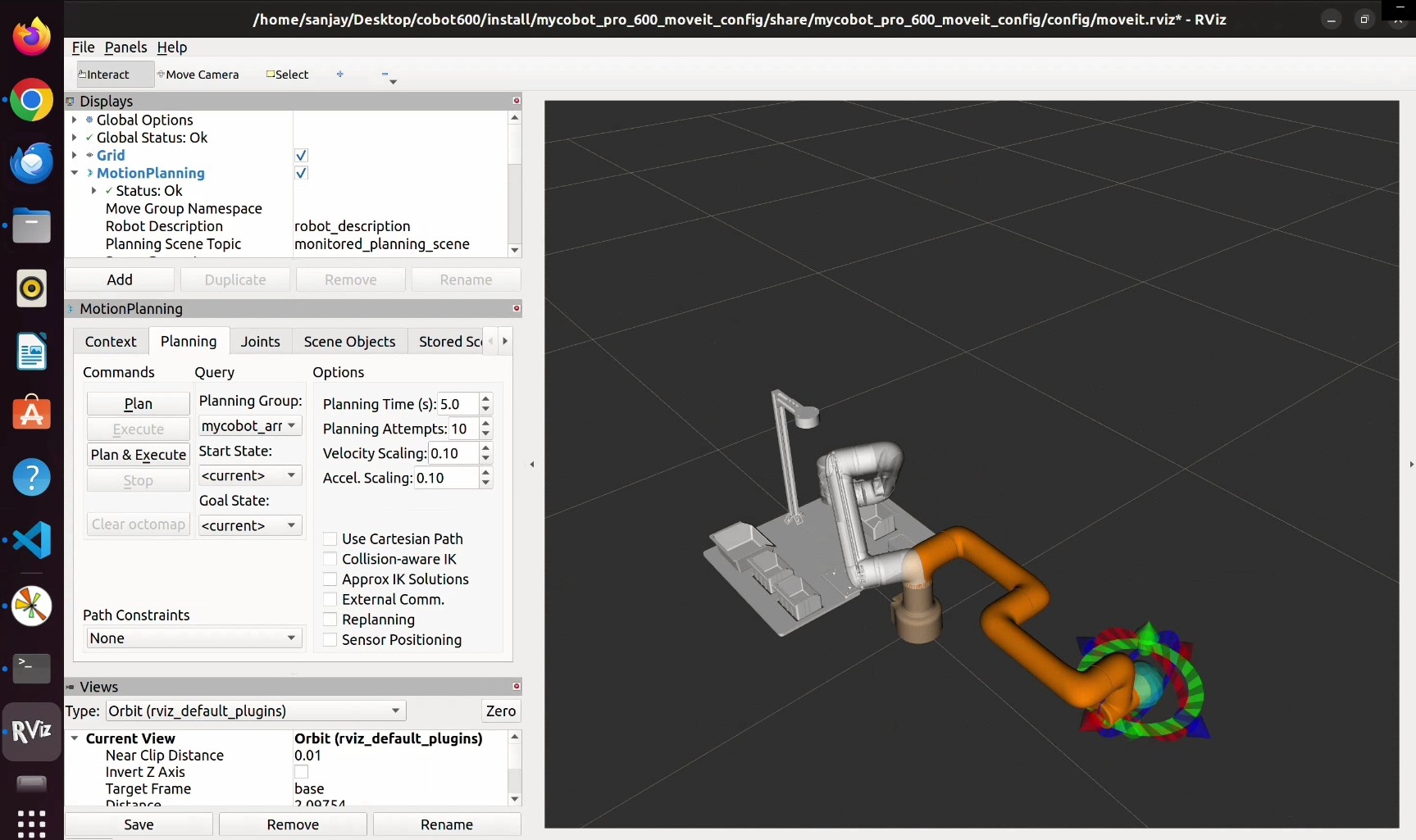
4×4 Maze Solving using MyCobot Pro 600 Robotic Arm
RAS 545 — Robotic Systems I, Arizona State University
ROS2MoveIt2OpenCVA* AlgorithmPythonC++TCP/IPDigital Twin
- Built the full pipeline end-to-end: camera calibration, OpenCV maze detection, A* pathfinding, and 35-waypoint execution on a 6-DOF arm via MoveIt2 and Ethernet TCP control.
- Developed camera calibration pipeline and mapped pixel coordinates to real-world robot workspace coordinates.
- Deployed a full digital twin in ROS2 with MoveIt2 for sim-to-real trajectory planning and joint state logging.
- Implemented TCP socket programming for real-time communication between the planning computer and the robot.
- KDL solver was producing erratic joint rotations, diagnosed the issue, refined URDF joint limits, and got feasible trajectories the real robot could execute safely.

PROJECT 04
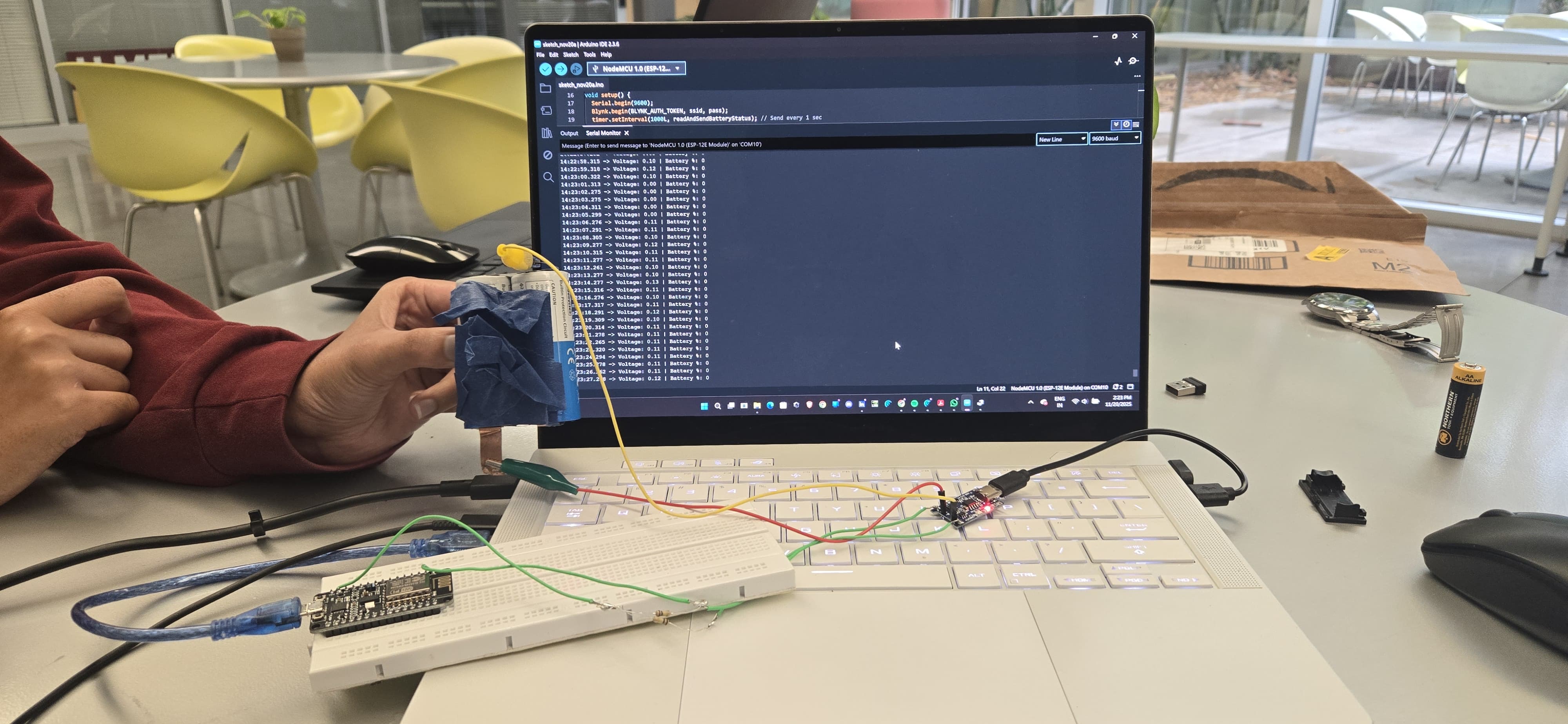
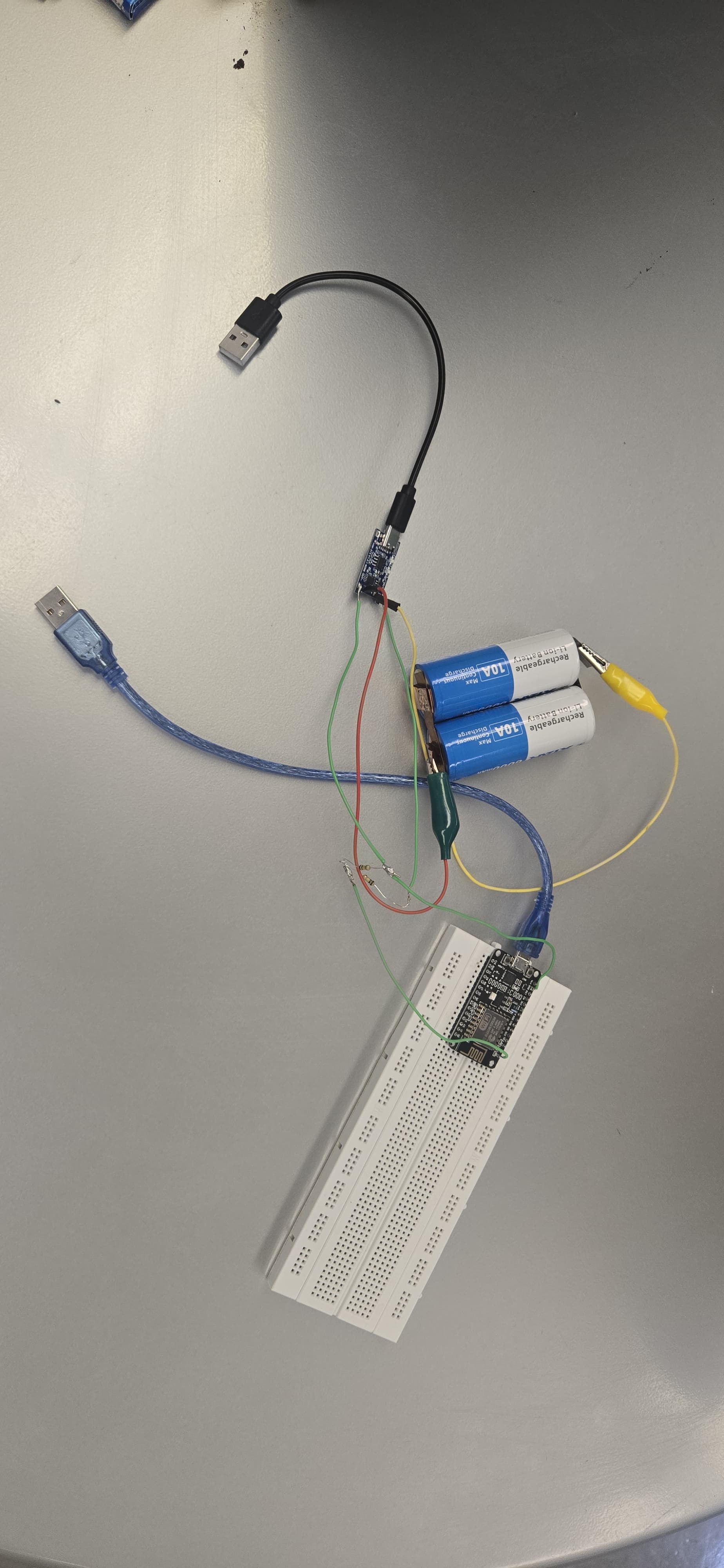
IoT-Based Battery Status Monitoring System
EGR 538 — Batteries & EV Technologies, Arizona State University
ESP8266Arduino IoT CloudTP4056Li-ionVoltage DividerBuck-Boost
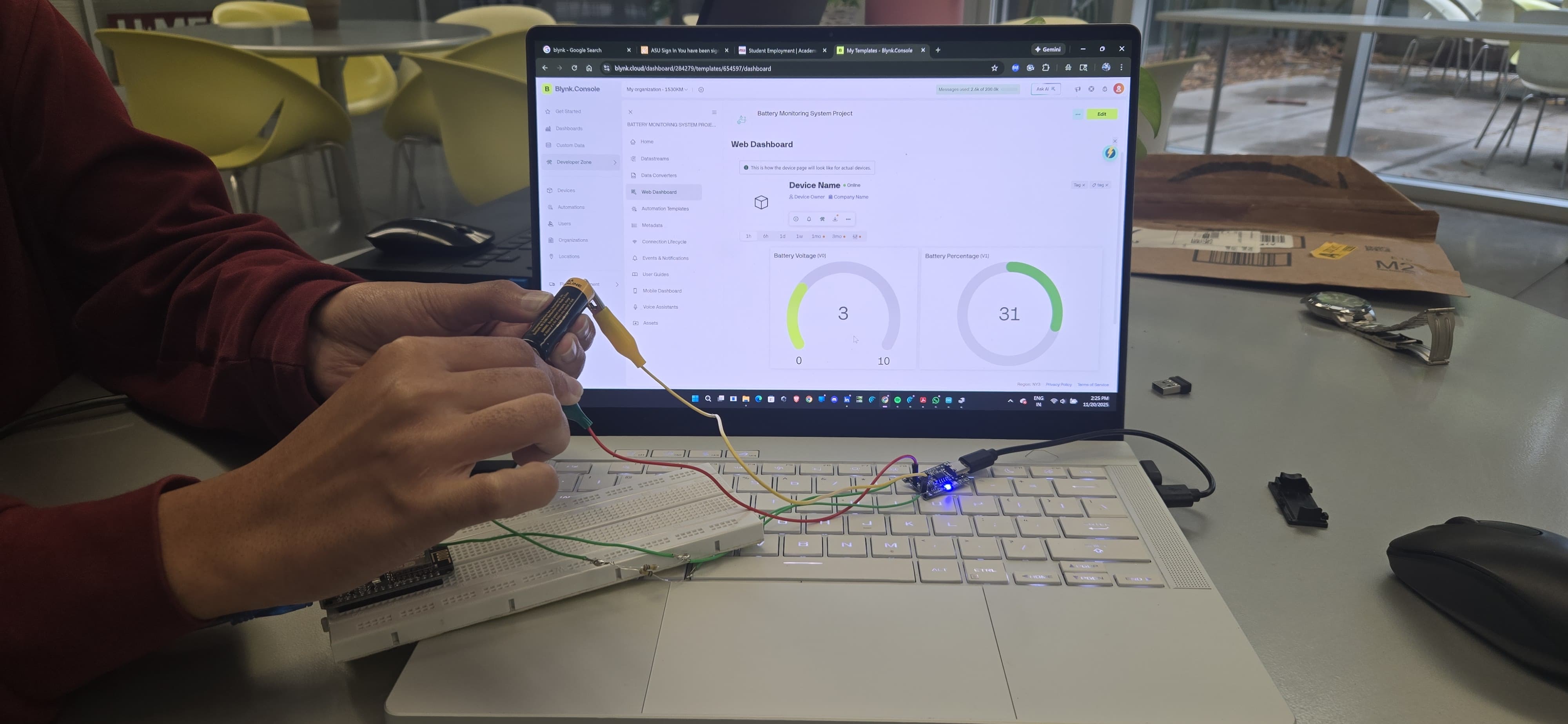
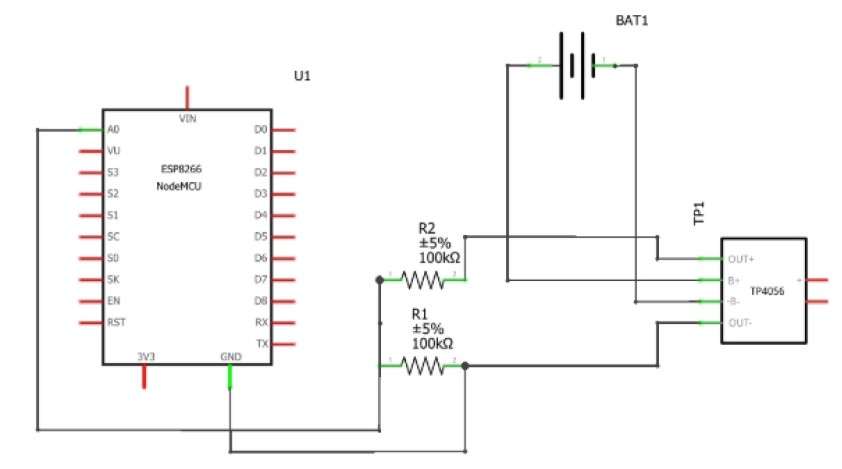
- Built an IoT system for real-time monitoring of Li-ion battery voltage and state-of-charge using NodeMCU ESP8266, TP4056, and resistive voltage divider.
- Designed voltage divider circuit scaling battery voltage (0–4.2V) to ESP8266's ADC range (0–3.3V) with consistent accuracy.
- Transmitted data to Arduino IoT Cloud dashboard for remote voltage and percentage visualization.
- Studied Buck-Boost converter topology supporting multiple battery chemistries with ~92% efficiency.
PROJECT 05
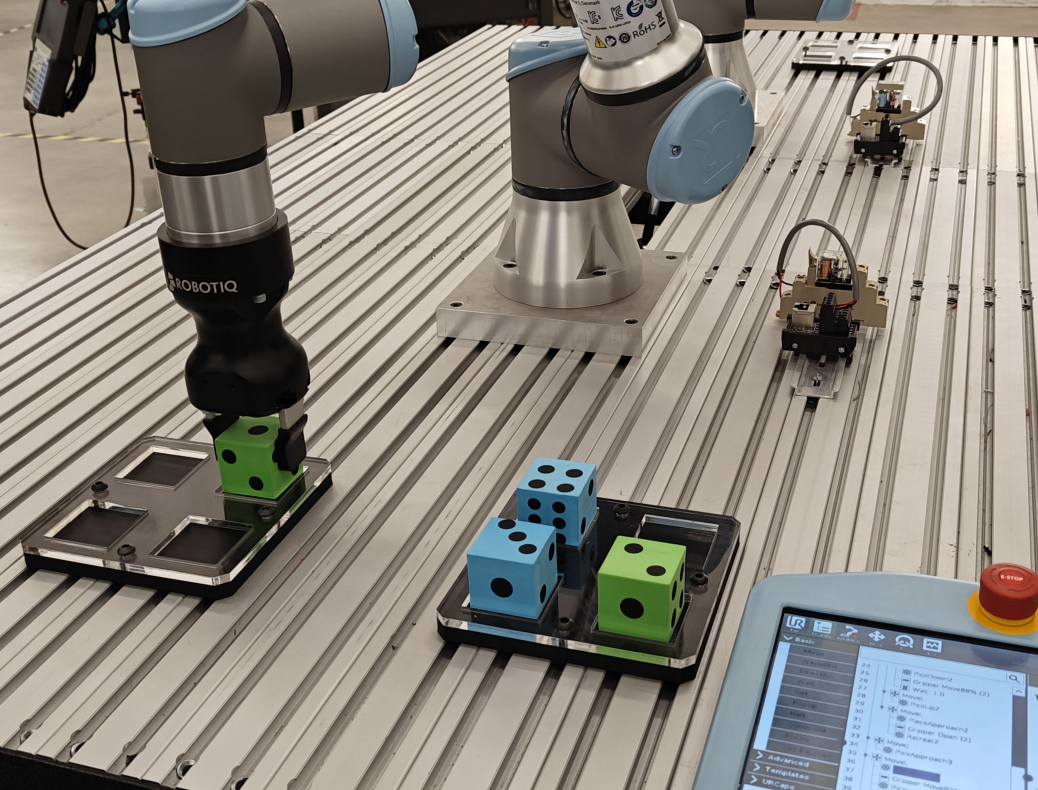
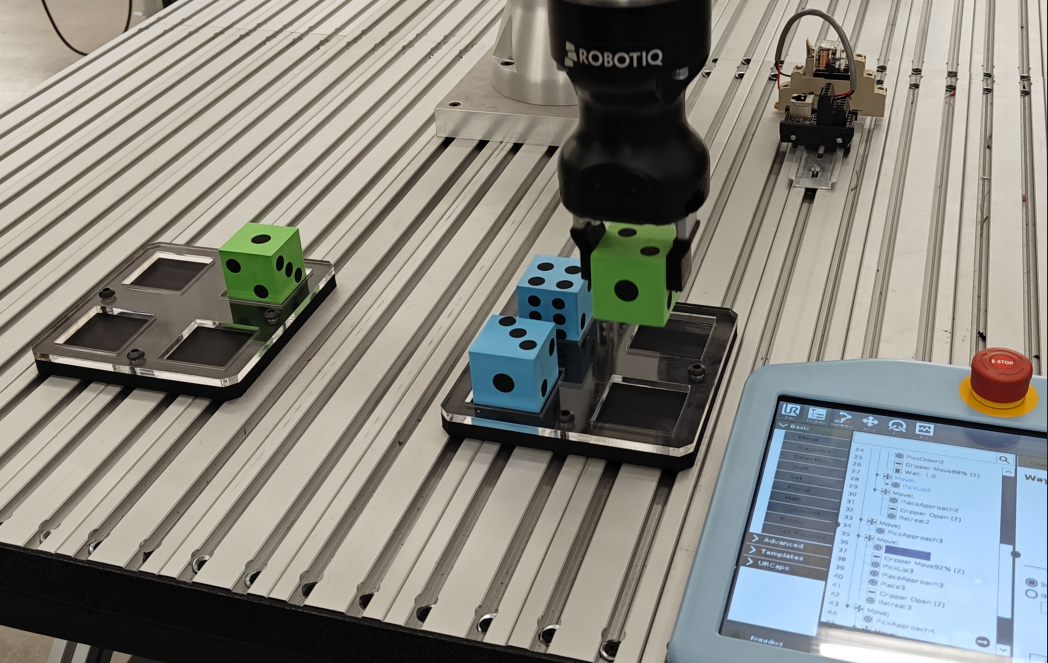
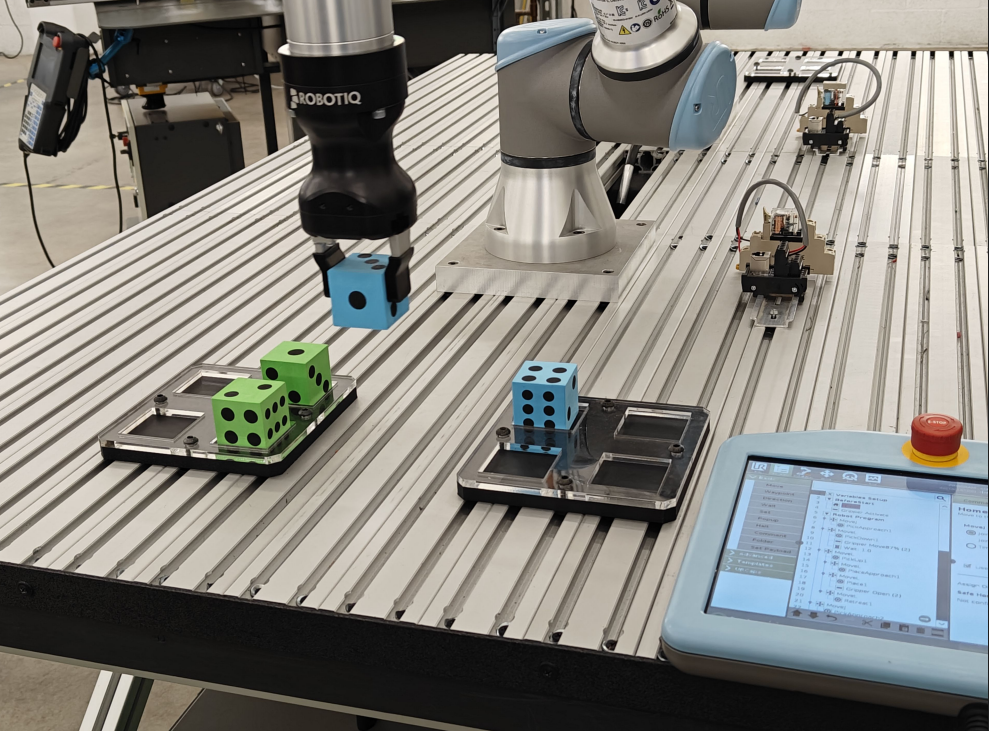
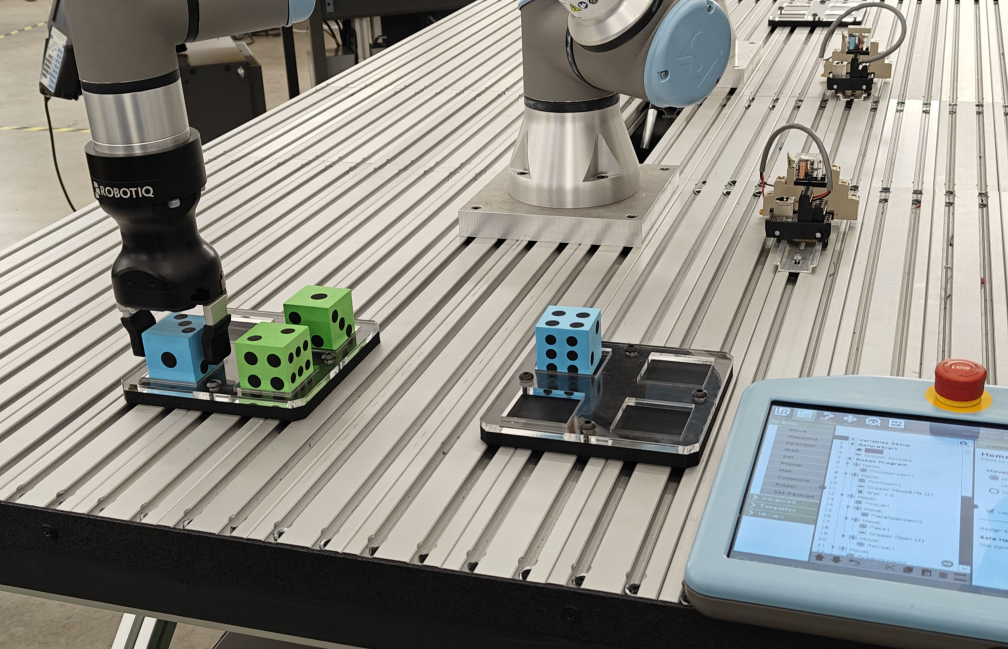
Collaborative Robot Programming for Pick-and-Place Palletizing Using a UR Cobot & Robotiq Gripper
EGR 550 — Mechatronic Systems, Arizona State University
Universal RobotsRobotiq GripperTeach PendantMove J / Move LMotion PlanningIndustry 4.0
- Programmed a UR-series cobot via the teach pendant to execute an industrial-style pick-and-place palletizing operation, defining precise waypoints and motion paths for multi-object handling.
- Implemented Move J (joint) commands for fast inter-waypoint transitions and Move L (linear) commands for precise vertical/horizontal movements during cube pickup and placement, ensuring alignment and collision avoidance.
- Coordinated Robotiq gripper open/close sequences with arm trajectories, designing upward clearance motions above the conveyor tray to eliminate arm-conveyor interference.


PROJECT 06
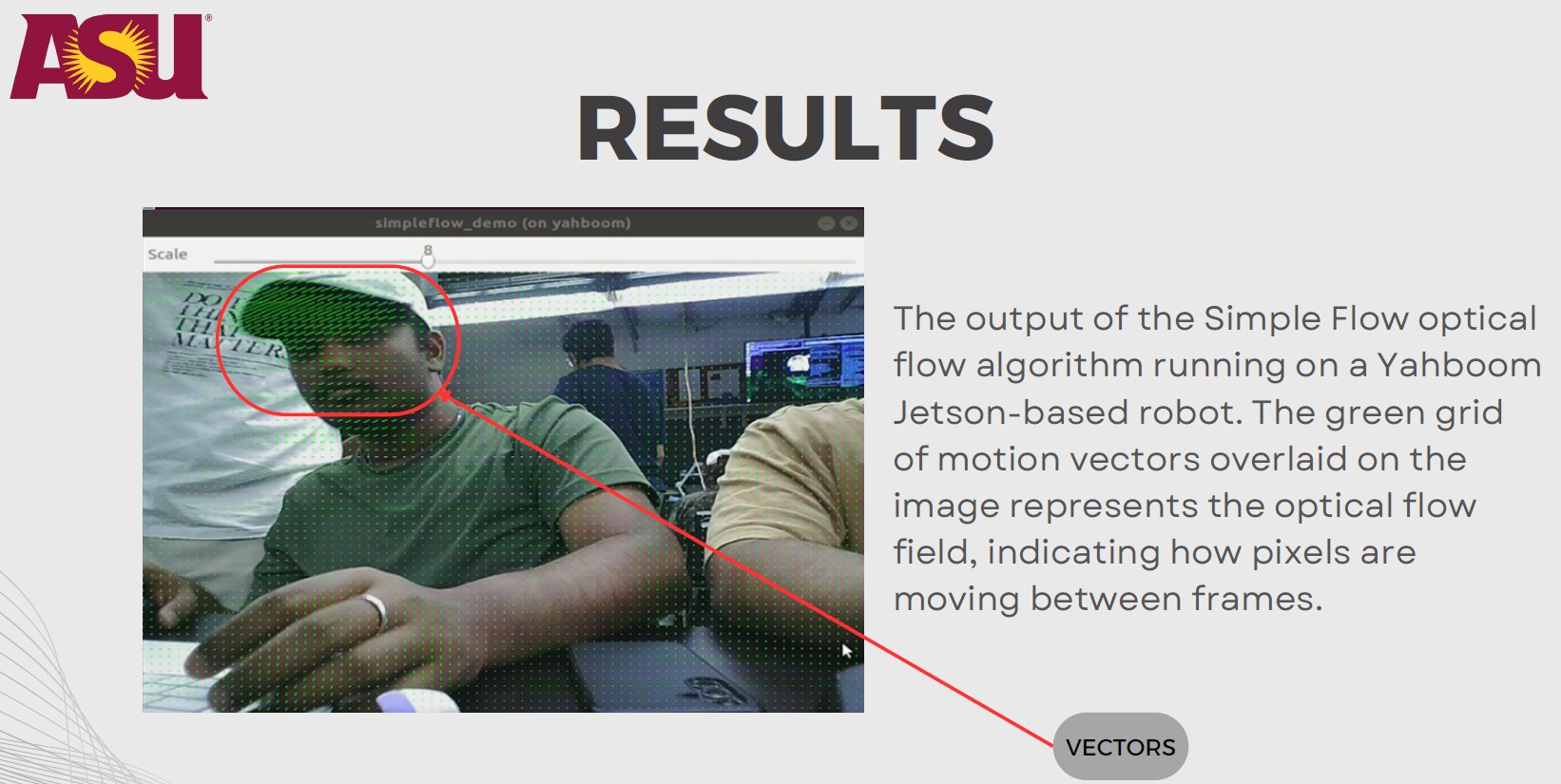
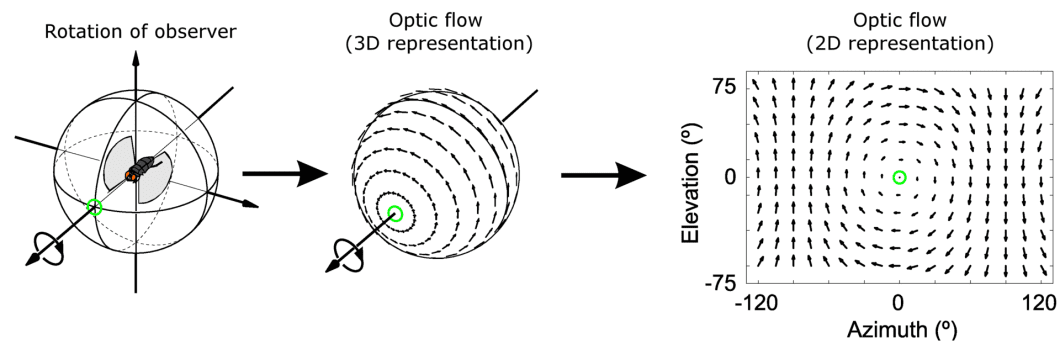
Motion Analysis Nodes — SimpleFlow Optical Flow
EGR 530 — Principles of Systems Engineering, Arizona State University
OpenCVROSJetsonC++PythonComputer Vision
- Deployed SimpleFlow optical flow on a Jetson-based robot with ROS for real-time motion tracking.
- Analyzed ROS node communication (USB camera → image transform → simple_flow → web video server).
- Implemented dense optical flow with configurable parameters and RMSE-based accuracy validation.
PROJECT 07
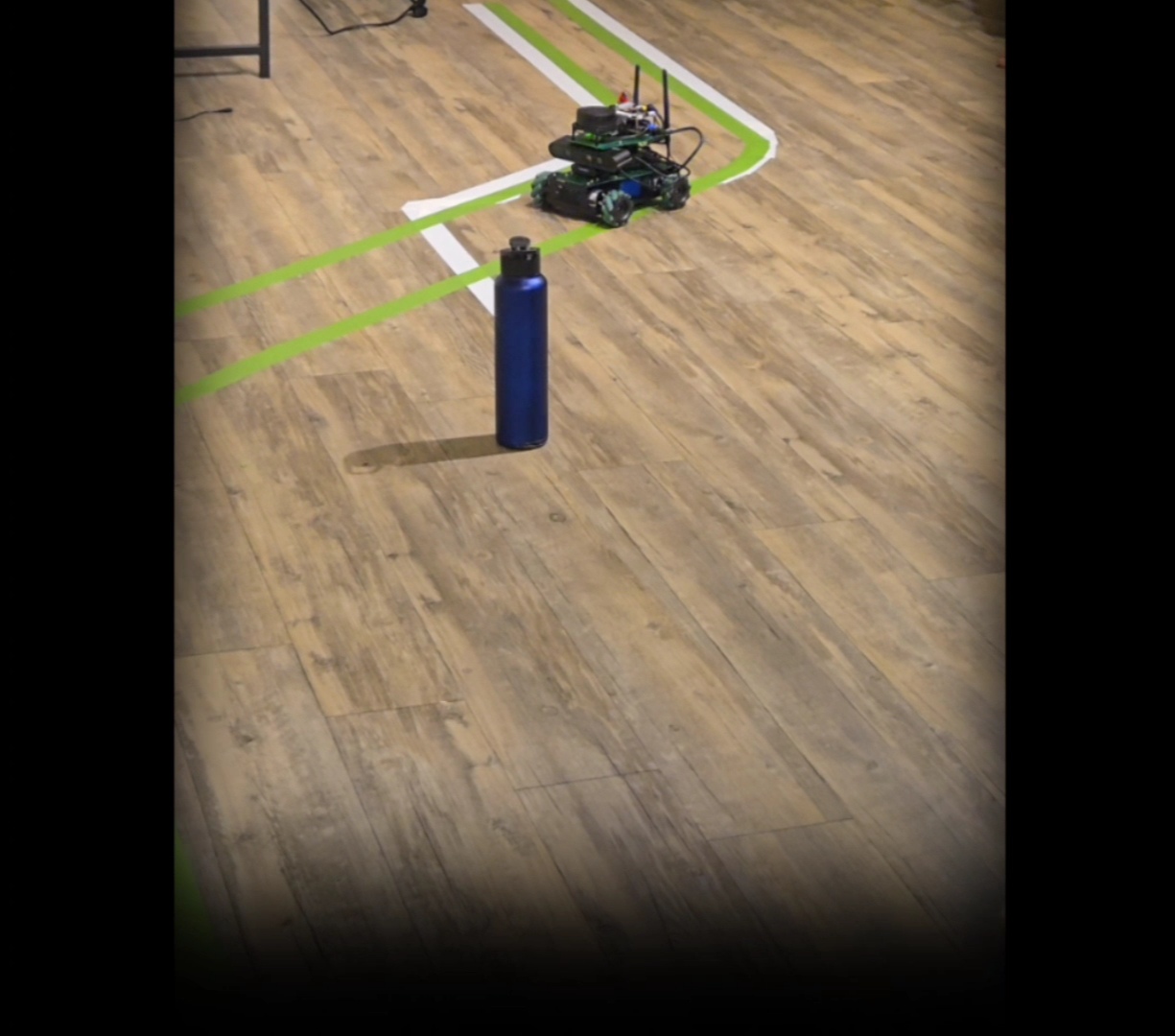
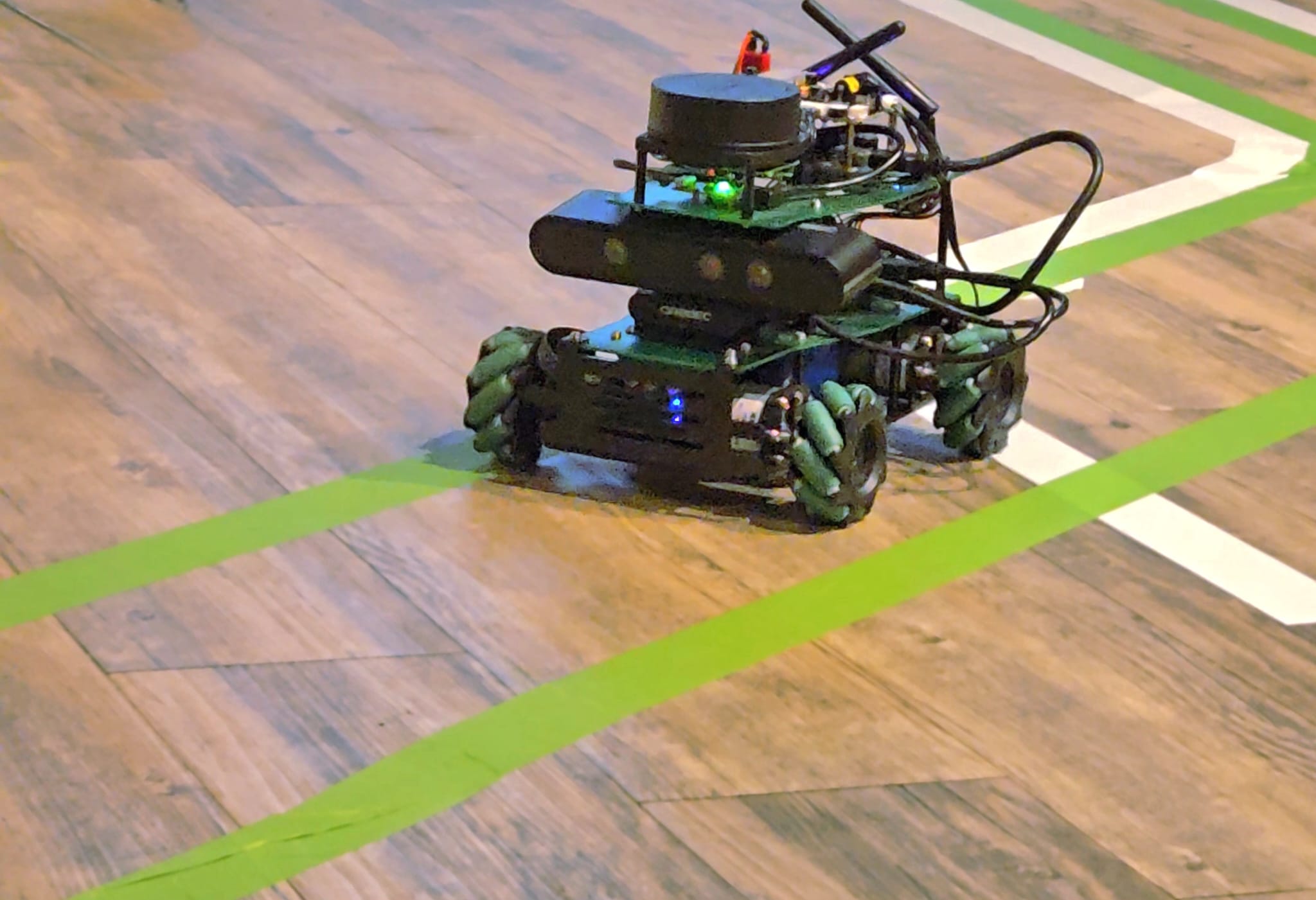
Autonomous Lane Detection & Following — Yahboom ROSMASTER X3
EGR 530 — Principles of Systems Engineering, Arizona State University
OpenCVROSJetsonC++PythonComputer Vision
- Developed a lane detection system that processes live camera frames to identify road boundaries, testing and refining 3 different approaches over 5 algorithm iterations to achieve reliable autonomous steering.
- Reduced false lane detections caused by floor textures and lighting changes by switching to green-tape markers and applying a bird's-eye view camera correction, improving detection consistency across 2+ lighting conditions.
- Tuned the robot's steering controller across 50+ parameter adjustments to minimize overshooting and oscillation, enabling the robot to autonomously follow a multi-turn indoor track without manual intervention.


PROJECT 08
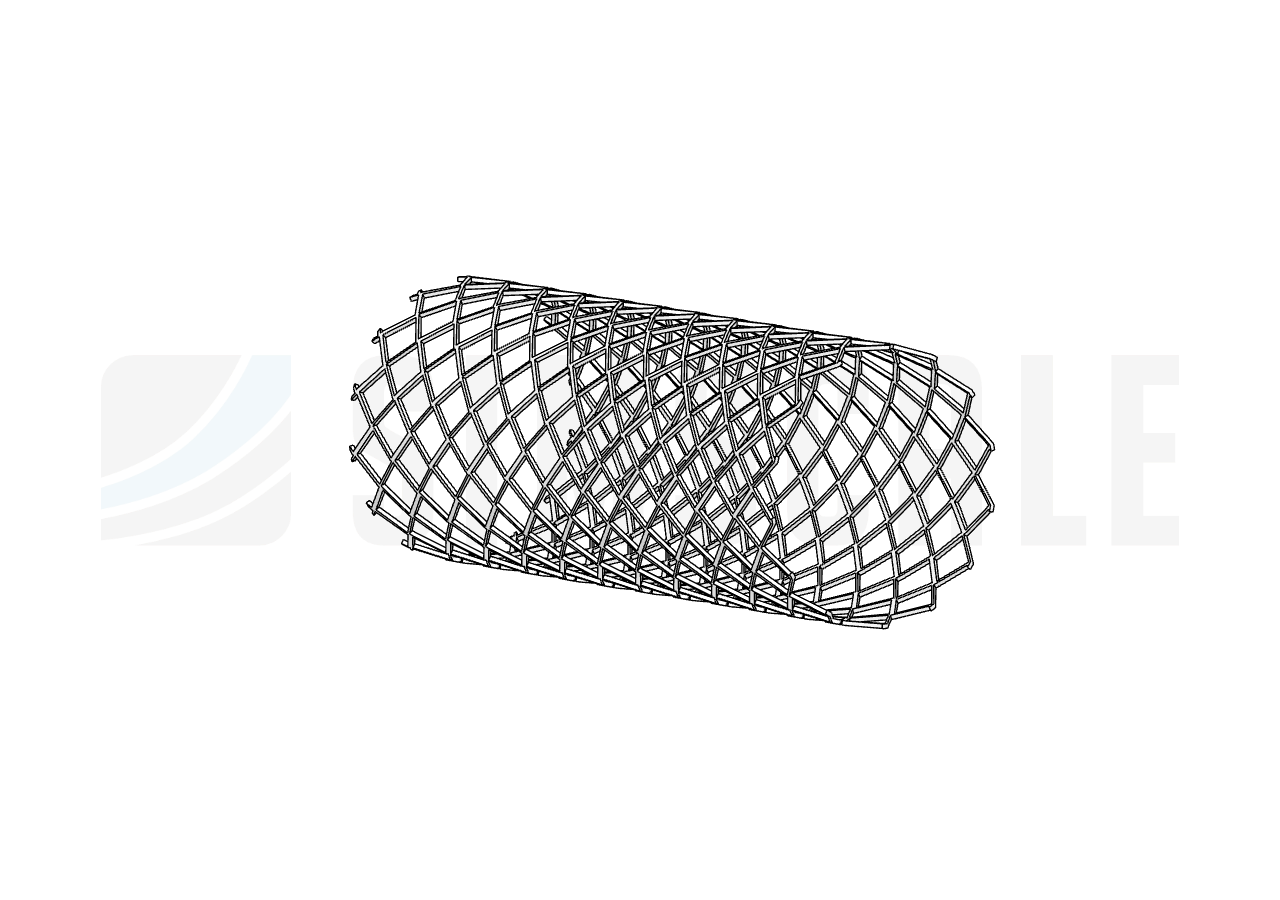
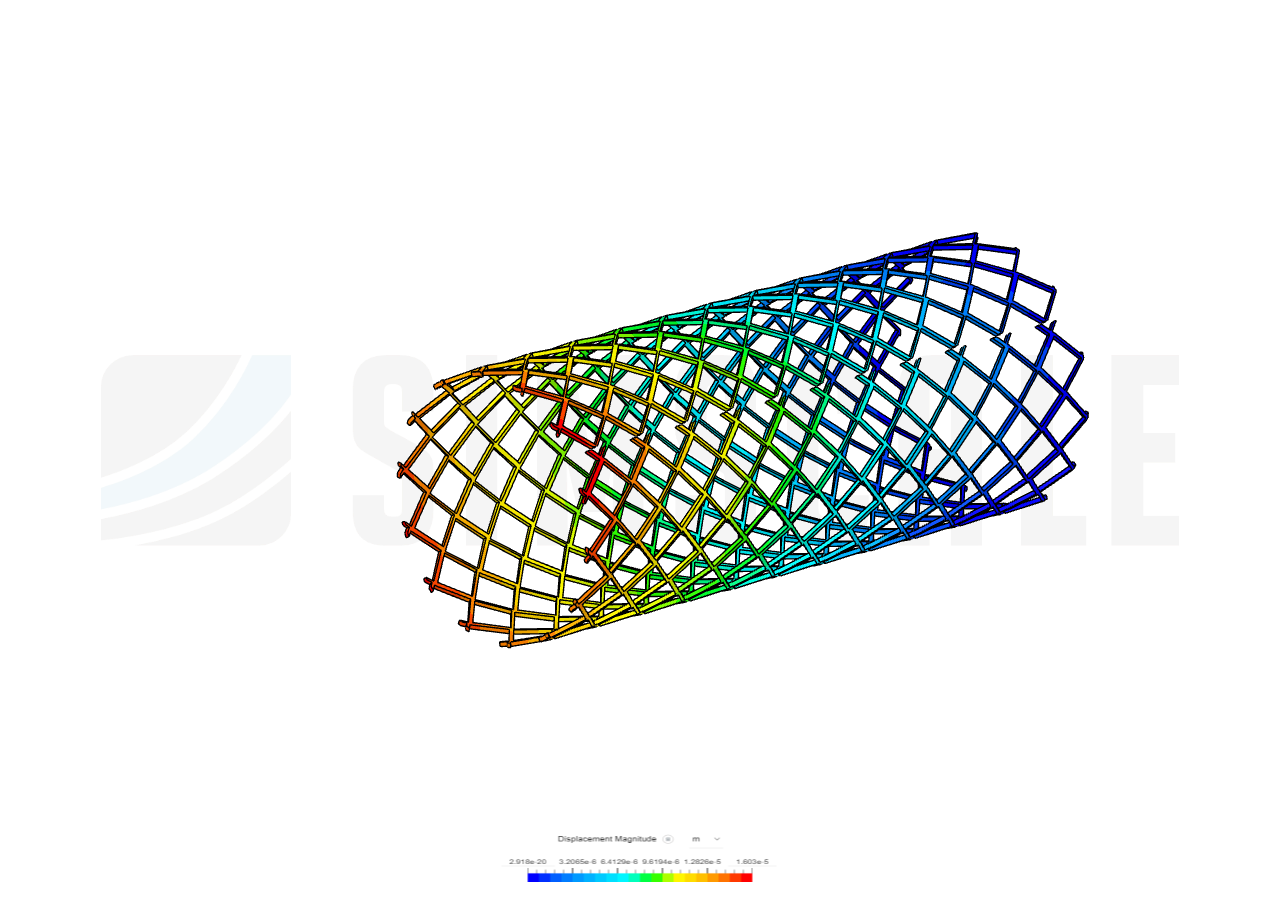
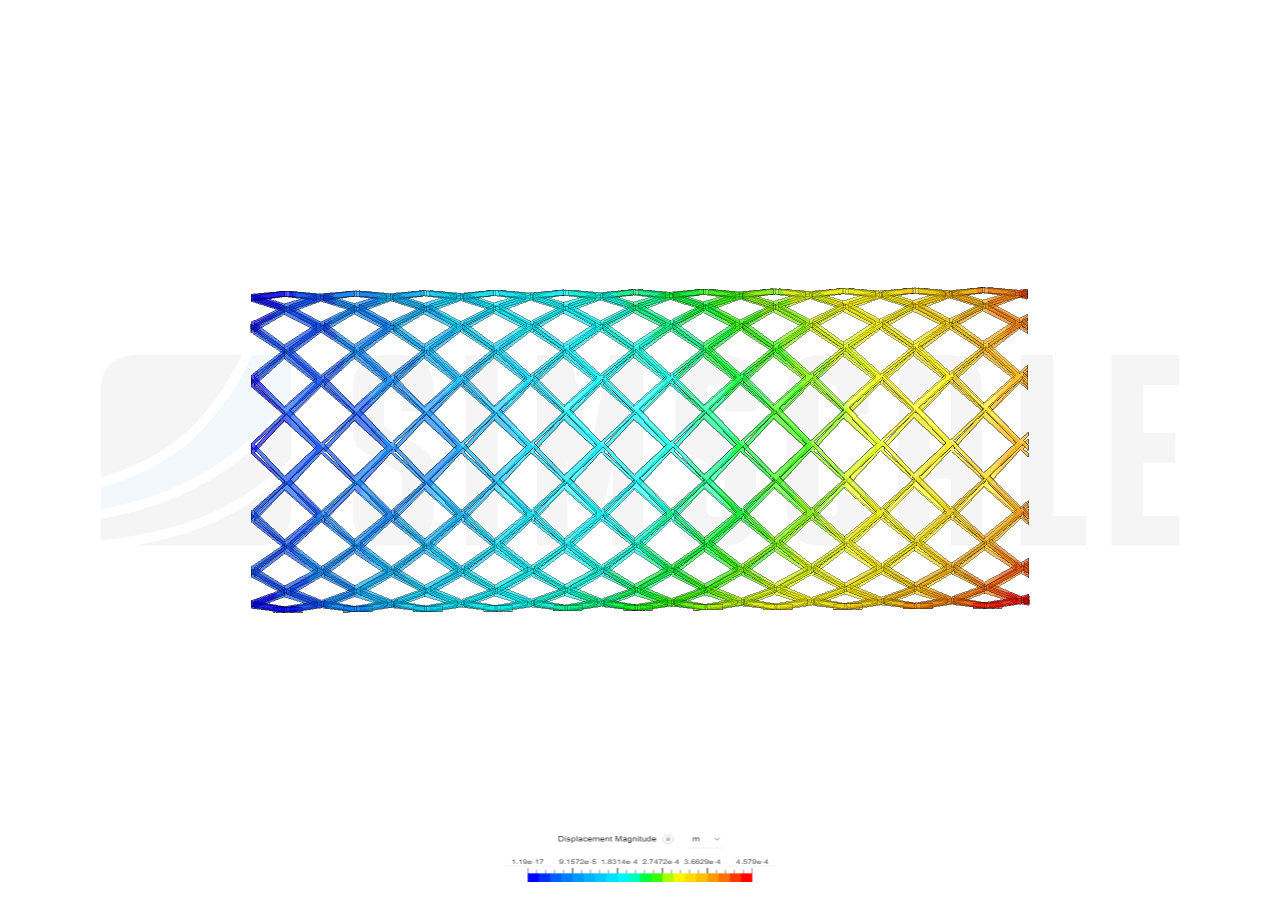
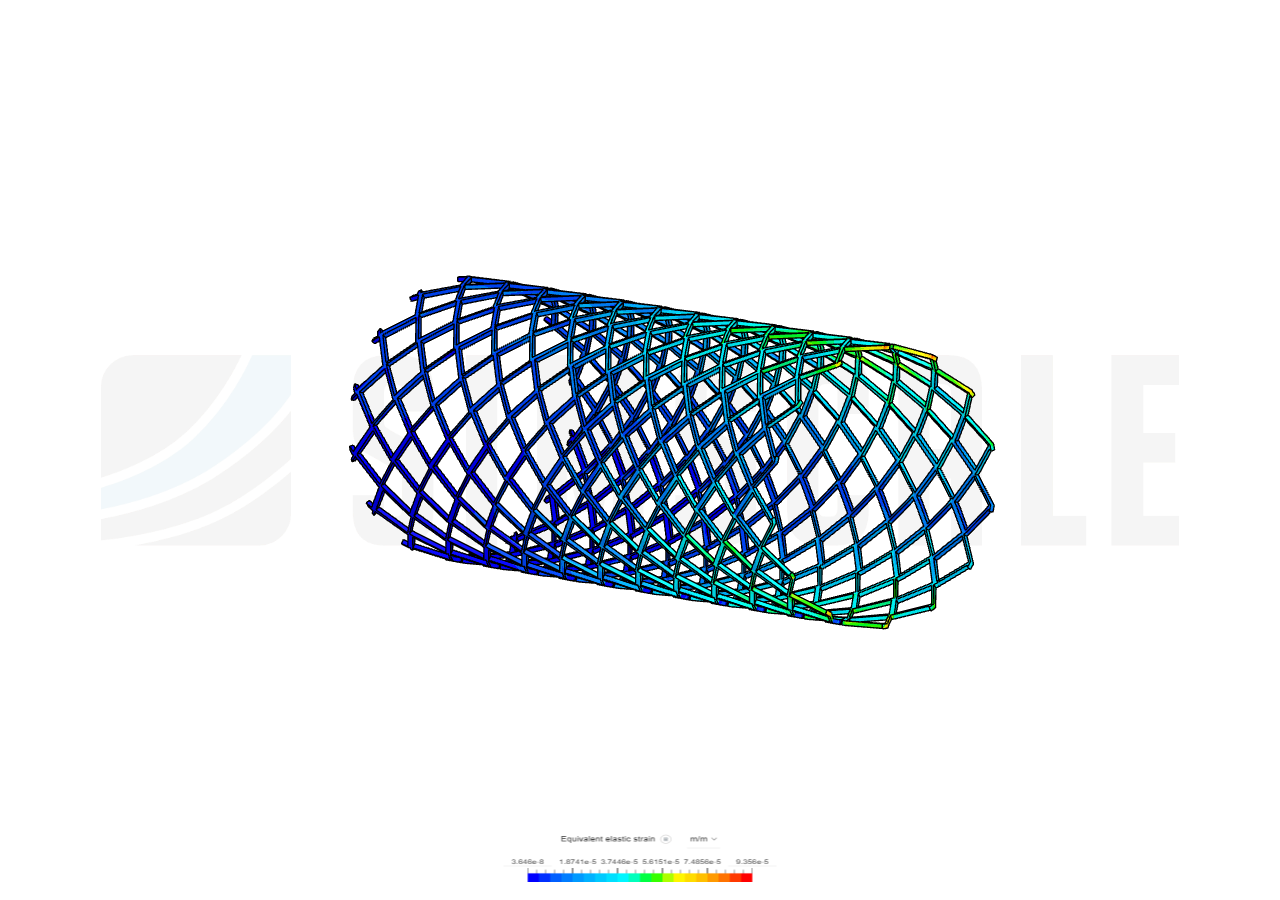
Cardiovascular Stent – Nonlinear FEA & Design Verification
SolidworksNon-Linear316L SSSimscaleFinite Element AnalysisStent
- Developed parametric lattice stent geometry in SolidWorks and executed nonlinear FEA under physiological loading (0.013 MPa) with 316L stainless steel properties.
- Confirmed structural integrity with peak stress below 12% of material yield strength (>8× safety margin); documented simulation results in technical reports supporting design verification.
- Translated functional requirements into verified design outputs using a design control framework; documented analysis results in technical reports supporting design verification.
// Patents & Certifications
Intellectual Property
A Wearable Insole for Foot Reflexology (SET)
Design Patent No: 404185-001
A SYSTEM AND METHOD PREVENTING MISFUELLING IN VEHICLES
Patent No: 202441045378
An Energy Harvester Sole for Footwear
Design Patent No: 410719-001
Medical Device Design & Development Control
Certification — ISO 13485